
Die pharmazeutische Industrie ist eine qualitätskritische Industrie, da sie eng mit dem Leben und der Gesundheit der Menschen verbunden ist. Am Fließband wird häufig ein Vision-Inspektionssystem eingesetzt. Zu den typischen Prüfobjekten gehören normalerweise Kapseln, Spritzen, Blasenkappen, Verpackungsetiketten usw. Alle Kameras von Daheng Imaging werden gründlichen kritischen Tests unterzogen, um sicherzustellen, dass sie die industriellen und professionellen Anforderungen unter den harten Bedingungen erfüllen. Die pharmazeutische Produktion findet meist nicht in einem komfortablen Labor statt, aber zuverlässige Prüfergebnisse in einem rauen Umfeld sind ein Garant für die Arzneimittelqualität. Um zuverlässige Inspektionsergebnisse zu erzielen, bieten Daheng Imaging-Kameras hervorragende Bildqualität mit leistungsstarken digitalen Schnittstellen, sowie eine schnelle Triggerreaktion, die eine sehr genaue Erfassung gewährleisten kann. Darüber hinaus stellt die Triggersignalfilterfunktion sicher, dass nur die richtigen Impulse in die Kamera eingegeben werden . Kein falsches Bild und kein fehlendes Bild sind die wichtigsten Schlüssel für das Vision-System in der Pharmaindustrie. Daheng Imaging-Kameras sind einfach gut darin.
Das fehler- und maßdynamische Erkennungssystem des Fahrzeugradsatzes ist ein auf der Bahn installiertes Sicherheitsinspektionssystem, mit dem die geometrischen Parameter des Radsatzes erfasst werden können, die den Laufflächenverschleiß und den Spurkranzverschleiß überprüfen können. Durch Computeranalyse kann das System den Sicherheitszustand des Fahrzeugradsatzes vorhersagen und es bequem machen, rechtzeitig mit dem Ausfall des Fahrzeugs umzugehen. Das System ist eine Garantie für die Sicherheit eines Zuges. Es kann bei der Online-Vermessung, der Lokomotiven-Lagervermessung, der Hochgeschwindigkeitsbahn-Lagervermessung, der U-Bahn-Lagervermessung usw. verwendet werden.
Alle DAHENG IMAGING Kameras werden gründlichen kritischen Tests unterzogen, um sicherzustellen, dass sie den industriellen und professionellen Anforderungen unter den rauen Bedingungen gerecht werden. Die Arbeitsumgebung des Fahrzeugradsatzes wird in der Regel herausgefordert, daher ist die Zuverlässigkeit und Stabilität der Kamera sehr wichtig. Bei dieser Anwendung werden gewöhnlich einige Laser mit rotem Spektrum oder einige Laser im nahen Infrarot verwendet. Die Nahinfrarot-Laser sind im Außenbereich besser geeignet als die Rotspektrum-Laser, da der sichtbare Spektrum-Laser leicht durch das Sonnenlicht gestört werden kann, sind einige Nahinfrarot-Kameras mit einigen Nahinfrarot-Lasern erforderlich.
Die MER-131-75GM-P NIR und die MER-232-48GM-P NIR sind Nahinfrarot-GigE-Kameras, die mit On-Semi-PYTHON-CMOS-Sensoren ausgestattet sind, die Sensoren haben eine optimierte Reaktion im Nahinfrarotband. MER-131-75GM-P NIR und MER-232-48GM-P NIR werden über Ethernet mit Strom versorgt und verfügen über optoisolierte I/Os. Sie sind so konzipiert, dass sie kritische EMV-Tests bestehen und die Anforderungen an die elektromagnetische Verträglichkeit des Schienenverkehrs erfüllen.

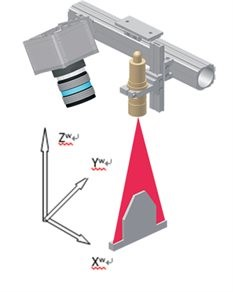
Ein 3D-Scanner ist ein Gerät, das ein reales Objekt oder eine Umgebung analysiert, um Daten über seine Form zu sammeln. Die gesammelten Daten werden verwendet, um digitale dreidimensionale Modelle zu erstellen. Gesammelte 3D-Daten sind für eine Vielzahl von Anwendungen nützlich, sie werden häufig für künstlerisches Design, Industriedesign, Reverse Engineering, Qualitätskontrolle, Prothetik und die Digitalisierung kultureller Artefakte verwendet. Es wird auch für das Online-Shopping, die Produktion von Filmen und Videospielen verwendet.

Viele verschiedene Technologien können verwendet werden, um diese 3D-Scangeräte zu bauen, aber die gebräuchlichen Methoden sind das Stereosehen und die Lasertriangulation mit Lichtscheibe. In einem Stereo-Vision-System werden zwei oder mehr Kameras mit Strukturlicht oder Kodierungsgitter verwendet, aus denen Sie 3D-Informationen der Oberfläche beliebig geformter Objekte ableiten können.
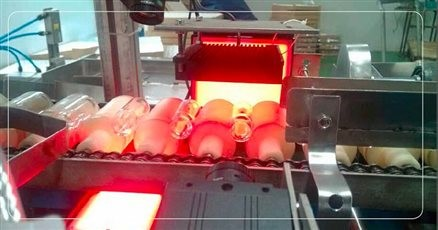
Wir können im Allgemeinen alle Arten von Glasflaschen in unserem Leben sehen, wie Bierflaschen, Getränkeflaschen, Parfümflaschen usw. Diese Glasflaschen gehören normalerweise zu Formflaschen, die durch Gießen von Flüssigkeit in eine Form hergestellt werden, um eine bestimmte Form zu erzeugen. Und es gibt noch eine andere Art Glasröhre für Medizin oder Pharmazie, sie werden meist ohne Form hergestellt und benötigen eine kritische Qualität.
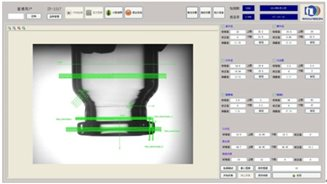
In Glasflaschenfabriken werden Bildverarbeitungssysteme typischerweise am heißen Ende oder am kalten Ende des Prozesses installiert, die Inspektionsmaschine verwendet Hochgeschwindigkeitskameras, um Echtzeitbilder einer Glasflasche zu erfassen, und erhält dann detaillierte geometrische Parameter der Flasche und überprüfen Sie die Erkennungen. Durch den Vergleich der Messergebnisse mit den voreingestellten Dimensionsparametern kann die Inspektionsmaschine Abfallflaschen erkennen und aus der Produktionslinie auswerfen, wodurch eine starke Garantie für die Flaschenqualität und Produktionseffizienz gegeben wird.
MER-131-210U3M, MER-132-43U3M, MER-503-36U3M und MER-131-75GM-P der MERCURY-Familie haben einige Sonderzeichen wie hohe Bildrate, präzise Aufnahme, Plug-and-Play, stabile Multikamera laufen und so weiter. All dies macht sie zu den Lieblingskameras der Ingenieure im Inspektionssystem von Glasflaschen.

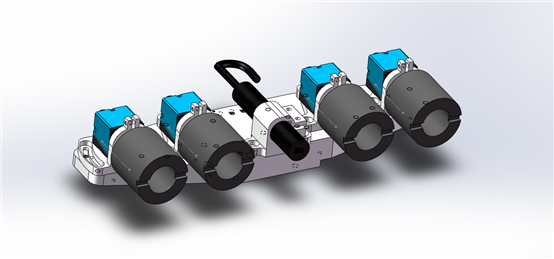
In der klassischen Logistikbranche wird die Ware in der Regel sortiert, Barcode gelesen und per Handbedienung erfasst und anschließend in den Kommissionierbereich geschickt. Da die Warenarten, die Formen und Materialien unterschiedlich sind, ist für die Sortierung ein hoher Personalaufwand erforderlich. Es dauert nicht nur lange und hat eine hohe Sortierfehlerquote, sondern hat auch einen hohen Arbeitsaufwand. Es würde die Liefergeschwindigkeit stark verlangsamen.
Um eine Lösung für diese Situation zu finden, hat DAHENG IMAGING ein Vision-Sorting-System entwickelt, das die Objekte schnell klassifizieren und die Position der Objekte ermitteln kann. Dieses System besteht aus der kompakten Digitalkamera von DAHENG IMAGING, die eine USB3.0-Schnittstelle verwendet, um Daten zur Analyse und Verarbeitung an einen PC-Controller zu übertragen. Schließlich wird die Gigabit-Ethernet-Schnittstelle verwendet, um die verarbeiteten Daten an den Roboter zu übertragen, um den Roboter zum „Aufnehmen“-Prozess zu führen. Das Sortiersystem kann nicht nur für die automatische Sortierung in der Logistikbranche verwendet werden, sondern auch für verschiedene industrielle Anwendungen wie Positionierung, Inspektion, Messung usw. wie im Bild unten gezeigt.
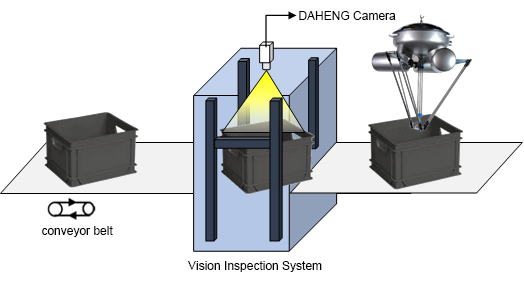
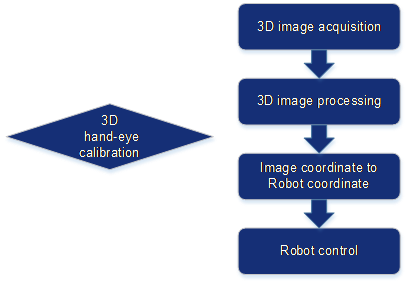
Dieses logistische Vision-Sortiersystem wird von DAHENG IMAGING MERCURY-Kameras und einem Delta-Roboter gebaut. Das gesamte System besteht hauptsächlich aus einem 3D-Bilderfassungsmodul, einem 3D-Bildverarbeitungsmodul, einem Bildkoordinatentransformationsmodul in ein Roboterkoordinatenmodul, einem Hand-Auge-Kalibrierungsmodul und einem Robotersteuermodul.

Embedded Vision ist in den letzten Jahren sehr populär geworden und eignet sich gut für einige Anwendungen, bei denen der Schwerpunkt auf niedrige Kosten, Stromverbrauch, Größe und Gewicht liegt, wie z.B pilotlose Automobile, Roboter und Medizinische Geräte etc.

